RACECAR LiDAR Datasets
Extraction and Pre-processing of LiDAR sensor data from a large open-source Multi-modal sensor dataset- RACECAR dataset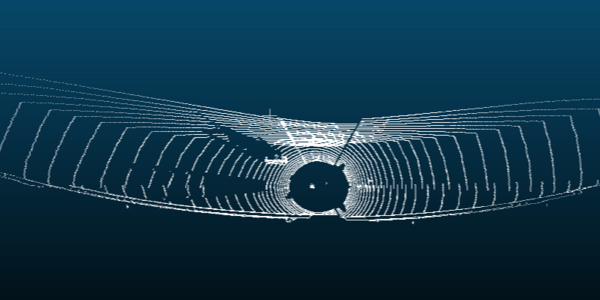

Extraction and Pre-processing of LiDAR sensor data from a large open-source Multi-modal sensor dataset- RACECAR dataset
Sentimental Analysis from text: A text analysis algorithm based on ETL approach with multiprocessing for parallel processing of multiple text files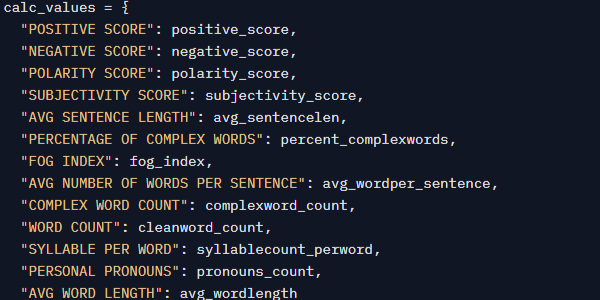
An IoT based Smart Parking System with Real-time slot allocation and slot availability prediction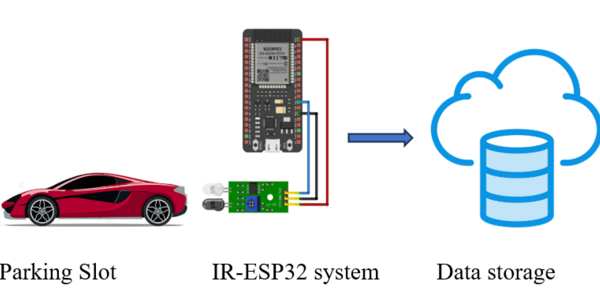
A smart parking lot usage data collected on ThingSpeak IoT cloud platform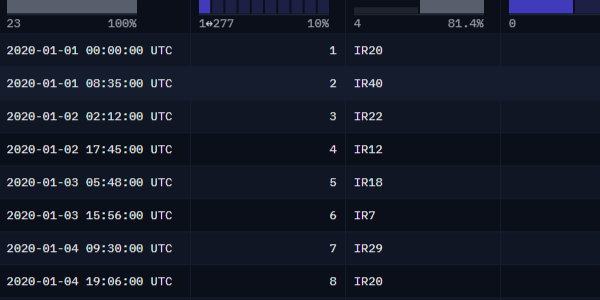
Published in 12th International Conference on Intelligent Systems and Embedded Design, 2024
Autonomous Racing, Computer Vision, Image Segmentation, Deep Learning, LiDAR Perception, Accelerated Computing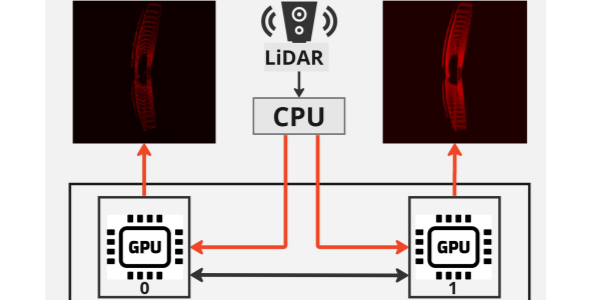
Recommended citation: Suwesh Prasad Sah "Parallel Neural Computing for Scene Understanding from LiDAR Perception in Autonomous Racing." IEEE/ISED International Conference on Intelligent Systems and Embedded Design, 2024
View Paper
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.